GMV desarrollará el sistema de mando y control del UGV europeo

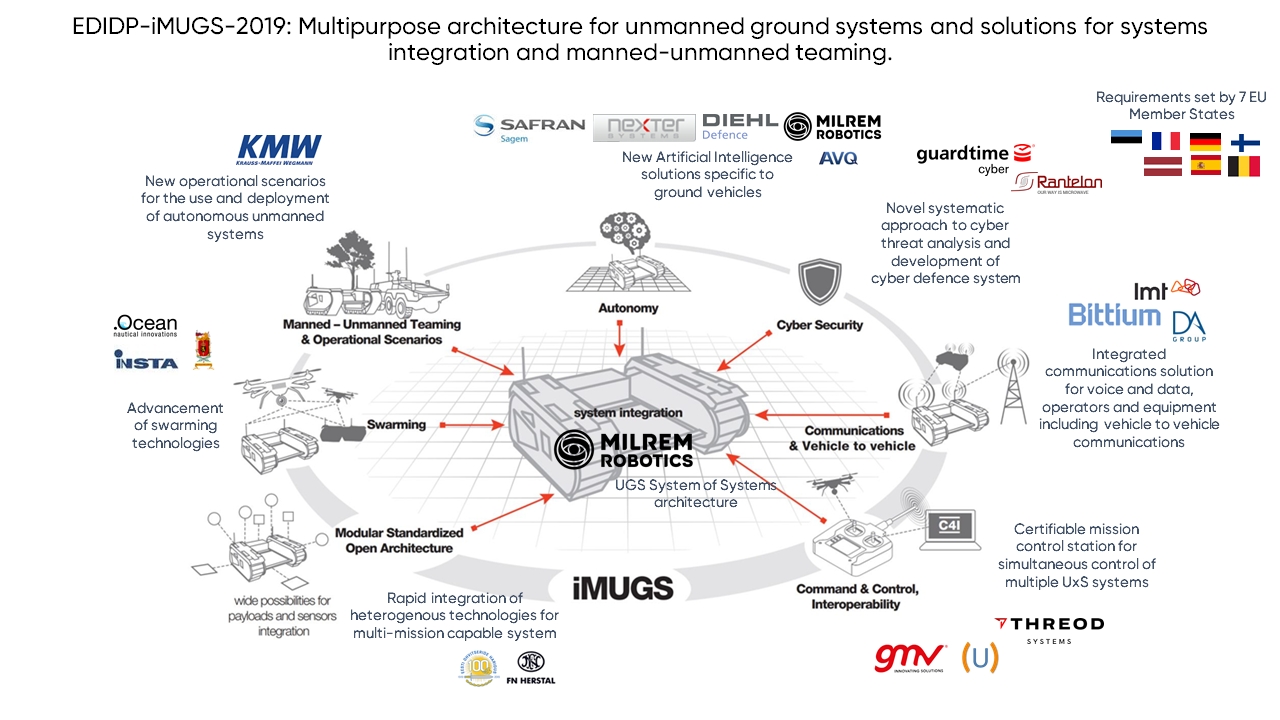
La compañía española GMV coordinará el desarrollo del sistema de mando y control del UGV- vehículo no tripulado terrestre- financiado por la Comisión Europea dentro del Programa de Desarrollo Industrial en materia de Defensa (Edidp). El proyecto, bautizado como Integrated Modular Unmanned Ground System (iMUGS), está liderado por la empresa estonia Milrem Robotics con un presupuesto de 30,6 millones de euros.
La iniciativa cuenta con la participación en total once empresas europeas del sector de la defensa y supone una de las principales inversiones realizadas directamente en defensa hasta la fecha por la Comisión. GMV gestionará, en concreto, el subproyecto de mando y control e interoperabilidad JISR (Joint Intelligence, Surveillance and Reconnaissance).
"Aportaremos nuestra experiencia en sistemas de C2 terrestres, e interoperabilidad JISR para desarrollar el componente táctico C2ISR, que permitirá planificar y realizar operaciones conjuntas de sistemas tripulados y no tripulados, así como explotar y difundir datos de sensores del UGV", detalla la empresa.
El sistema consistirá en un vehículo terrestre no tripulado robusto y modular, equipado con una solución de mando, control y comunicación resistente a la guerra electrónica y un software seguro de movilidad autónoma, que permita al operador controlar de forma simultánea y segura múltiples plataformas terrestres y aéreas. "Gracias a Imugs, los países europeos podrán utilizar vehículos no tripulados con funciones de logística e ISR, reduciendo la carga y aumentando la seguridad de las tropas", explica GMV.
UGV Themis
El punto de partida para el desarrollo de este vehículo es la plataforma Themis de Milrem, donde serán integrados diferentes sistemas de misión y soluciones de autonomía. El objetivo final es crear una arquitectura válida para su aplicación en vehículos tripulados o no tripulados, que permita estandarizar los sistemas terrestres y aéreos europeos y sus sistemas de mando y control, comunicaciones, sensores, cargas útiles y algoritmos de autonomía.